
学生姓名:刘泽虹
班 级:车辆2019-03班
指导教师:倪文波
毕设题目:基于STM32单片机的电动铆枪智能控制系统设计


一、概况
1.选题意义
铆接作为一种机械连接,可以实现钢-铝,钢-复合材料以及铝-复合材料的异种材料连接,并且连接强度高,连接质量稳定可控,易于实现自动化。铆钉连接还具有一次连接,永不松动的特点,在轨道交通车辆中运用越来越广泛。在实际生产中可用于车辆的以下连接:通用敞车及通用棚车的侧梁与侧柱之间、前后从板座与中梁间、脚凳与侧梁间、上心盘和中梁盖板的连接;转向架立柱磨耗板的安装;前后从板座的安装;绳栓、扶手、搭扣的安装;冲击座与端梁的连接等。
相比传统的液压、气动铆枪,电动铆枪采用电池供电,不需要动力线,使用场合更加灵活方便,成为目前铆接工具一个重要的发展方向。在当前的电动铆枪中,大部分铆枪只能够完成铆钉的铆接工作,并不能够判断出当前铆接过程质量的状况。借助于液压智能铆接工具的开发思路,通过计算机实时采集铆接过程中的铆接力与有效铆接长度,依据不同规格的铆钉对应的铆接力与有效铆接长度的关系,利用一定的公差带阈值,由计算机对铆接质量进行判断,解决铆接不到位、铆接质量不良等问题。
因此,本设计将记录电动铆枪在铆接过程中的力与位移信息,借助铆接力与位移曲线,完成铆接质量的判定。先根据电机的数学模型,通过测量电机的电压和电流甚至可以只用电流就获取电机的转矩,通过霍尔传感器获得电机的转角,再由铆枪的机械结构分别推算得出铆接力和位移;因此,将采用STM32单片机完成电机动作的控制及信息测量,设计一个智能的铆接工具。这对于保证铆接加工质量具有重要意义。同时,这种采用计算机控制系统对机械运动与工作过程进行控制和质量管理的方法,对于实现中国制造2025——智能制造同样具有重要意义。
2.任务分解
根据本选题的总体目标,将本毕业设计分解为如下子任务,其各子任务情况如下所示:
(1) 文献查阅和资料查找
查阅国内外资料,对选题项目有一个总体的认识,在大方向上做出方案规划,完成文献综述,翻译文献,准备和完成开题答辩。
(2) 理论学习和总体设计
a) 补充学习铆接相关知识,了解铆接的过程,了解铆接质量的评定方法,掌握铆枪的结构和工作原理。
b) 学习STM32单片机开发基本知识,STM32要掌握其硬件结构以及底层原理,同时学习相应的基于HAL库的控制。
c) 补充学习直流无刷电机工作及控制知识,能够推导BLDCM的数学模型,并且掌握FOC控制的过程及背后的各种坐标变换数学原理,力求能够做到在matlab/Simulink上完成仿真。
d) 补充学习掌握PCB电路的绘制方法,能够实现控制硬件电路的绘制仿真、打样及测试。
e) 根据所学知识完成更为详细的电动铆枪方案设计,包括铆枪机械结构、控制系统硬件电路、控制系统软件设计。
(3) 电机模型仿真及改造设计图
根据建立的电机数学模型和FOC控制原理,在matlab/Simulink上完成仿真分析,测绘并改进电动铆枪图纸。
(4) 控制系统软硬件开发
利用EDA软件绘制出智能铆枪的控制系统的PCB线路图,并且利用STM32CubeMX和Keil5软件完成适配的软件开发。
(5) 实验测试
控制系统PCB板打样测试,搭建电机的实物测试平台,如果测试效果良好,再上铆枪测试。
(6) 撰写论文
整理设计和测试结果,将其撰写为论文,同时也要准备答辩。
二、已完成工作
(1) 文献查阅和资料查找
完成了文献的查找,文献综述以及文献翻译。翻译文献合计52页,约1.9万字符。
(2) 理论学习
a) 完成了STM32单片机开发基本知识的学习,掌握了STM32硬件结构以及底层原理,同时完成了相应的HAL库控制的学习,包括Keil5和STM32CubeMx的软件使用。
b) 补充学习了直流无刷电机工作及控制知识,能够推导BLDCM的数学模型,并且掌握FOC控制的过程及背后的各种坐标变换数学原理。
c) 学习了 matlab/Simulink软件的使用。
d) 学习了电动铆枪的工作原理。
(3) 项目进度
a) 完成了铆枪的实物测绘,建模以及简单的运动动画的制作。
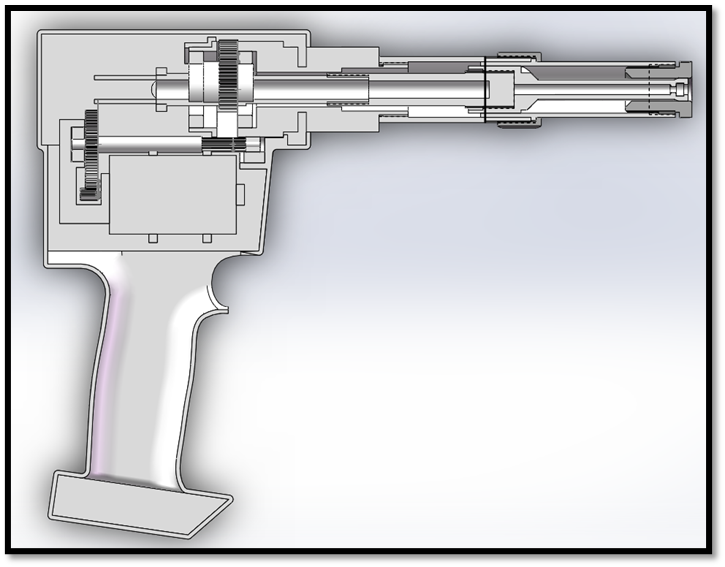
图 1 铆枪建模剖视图
b) 完成了电机的FOC控制原理的matlab/Simulink仿真。
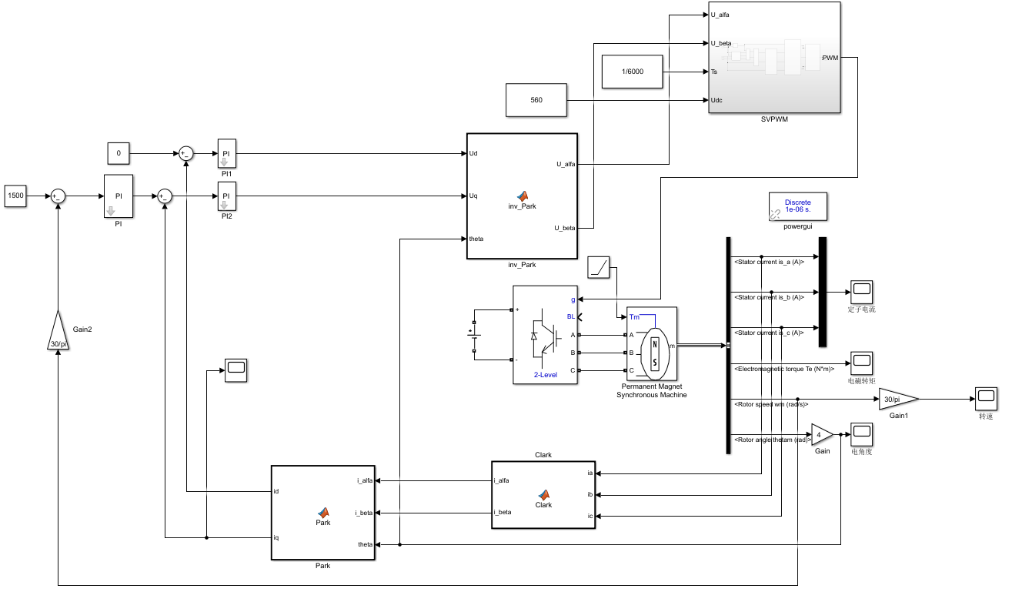
图 2 FOC的matlab/simulink仿真模块搭建
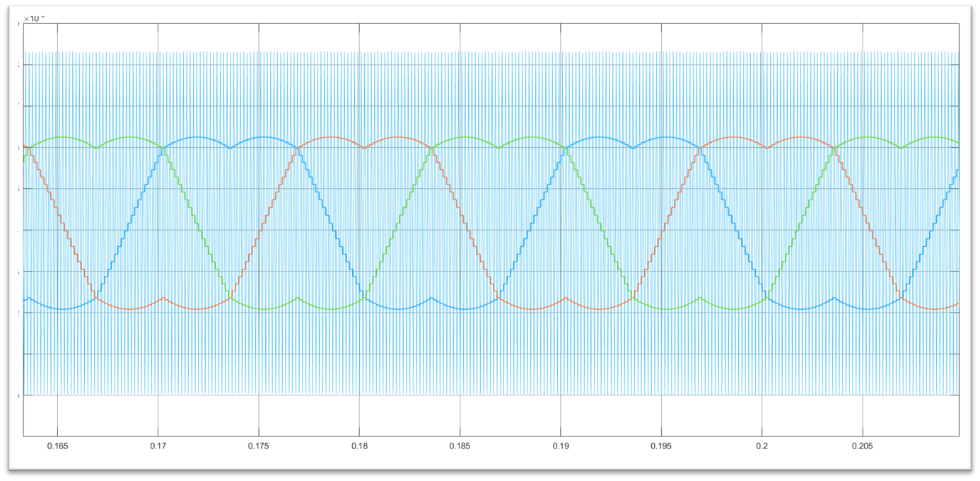
图 3 SVPWM的调制电压波形
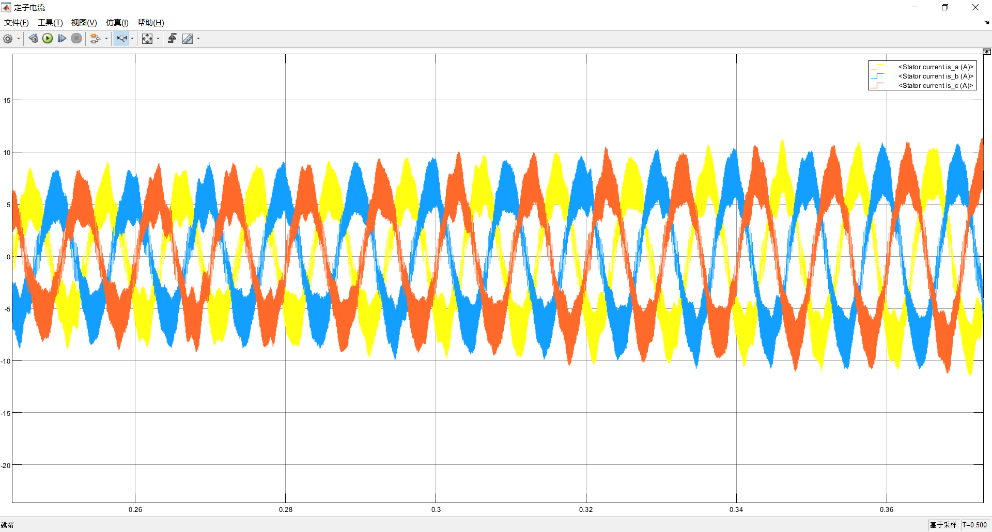
图 4 定子电流波形
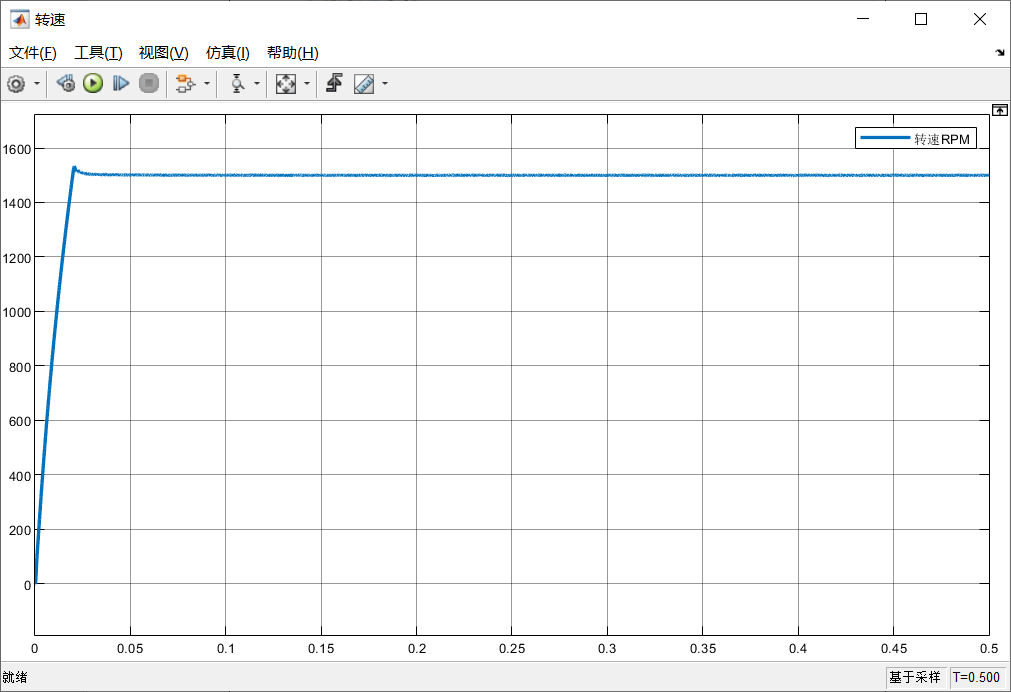
图 5 静态响应下转子转速曲线
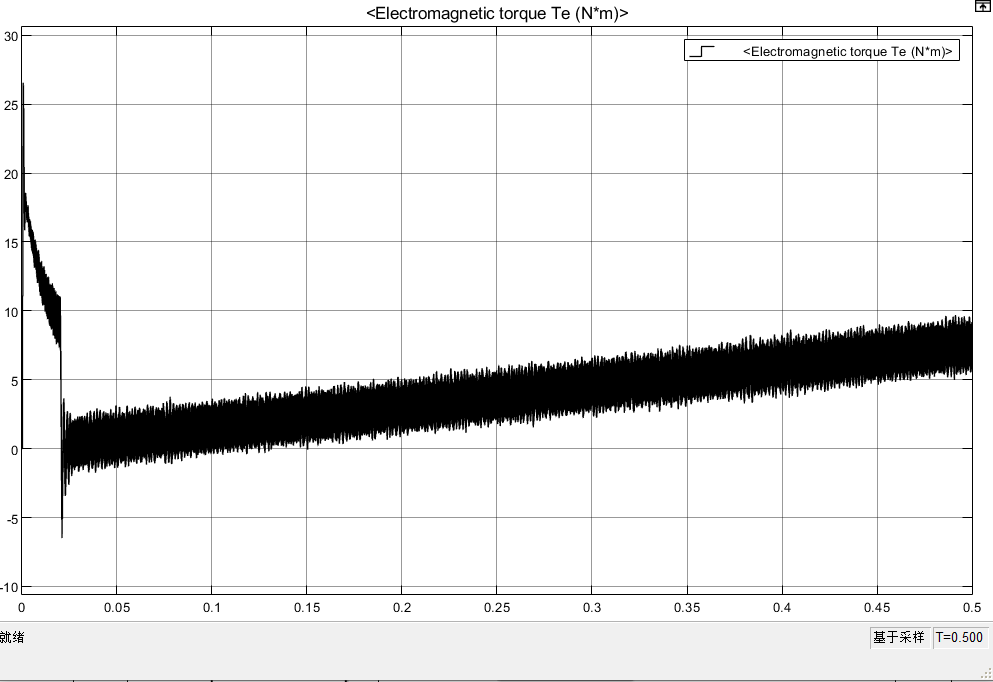
图 6 斜坡响应下的转矩变化曲线
c) 完成了第一版本电机绕组为星形接法的FOC控制软件的编写以及实验测试。
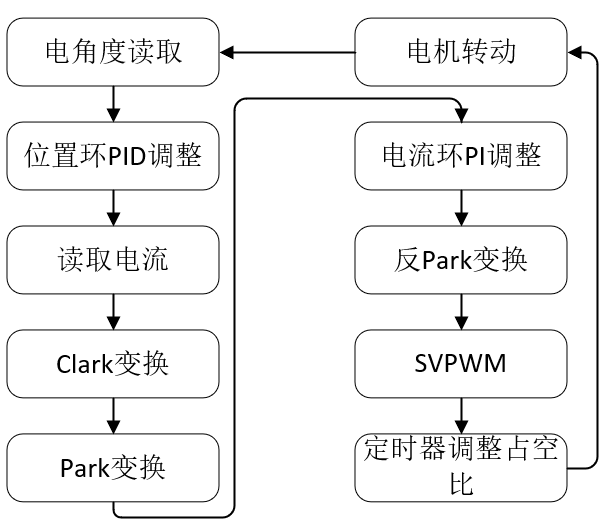
图 7 FOC算法核心流程图
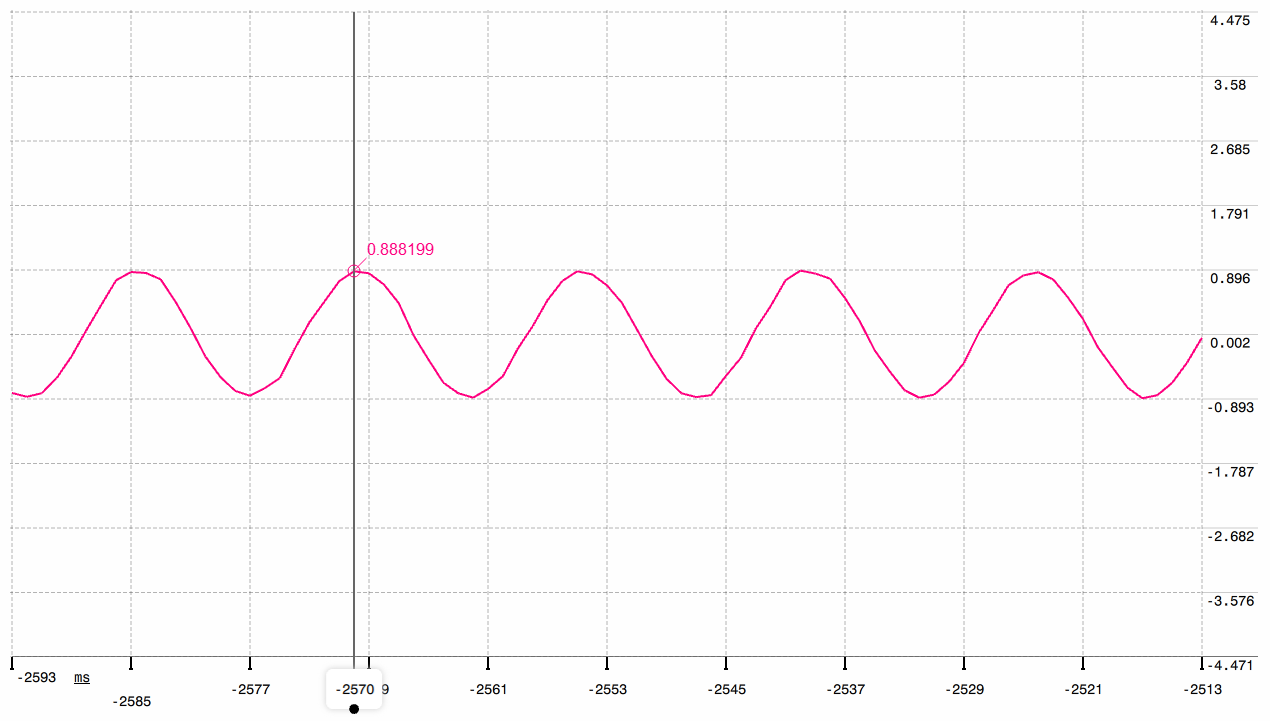
图 8 内置式三电阻电流采样原始波形
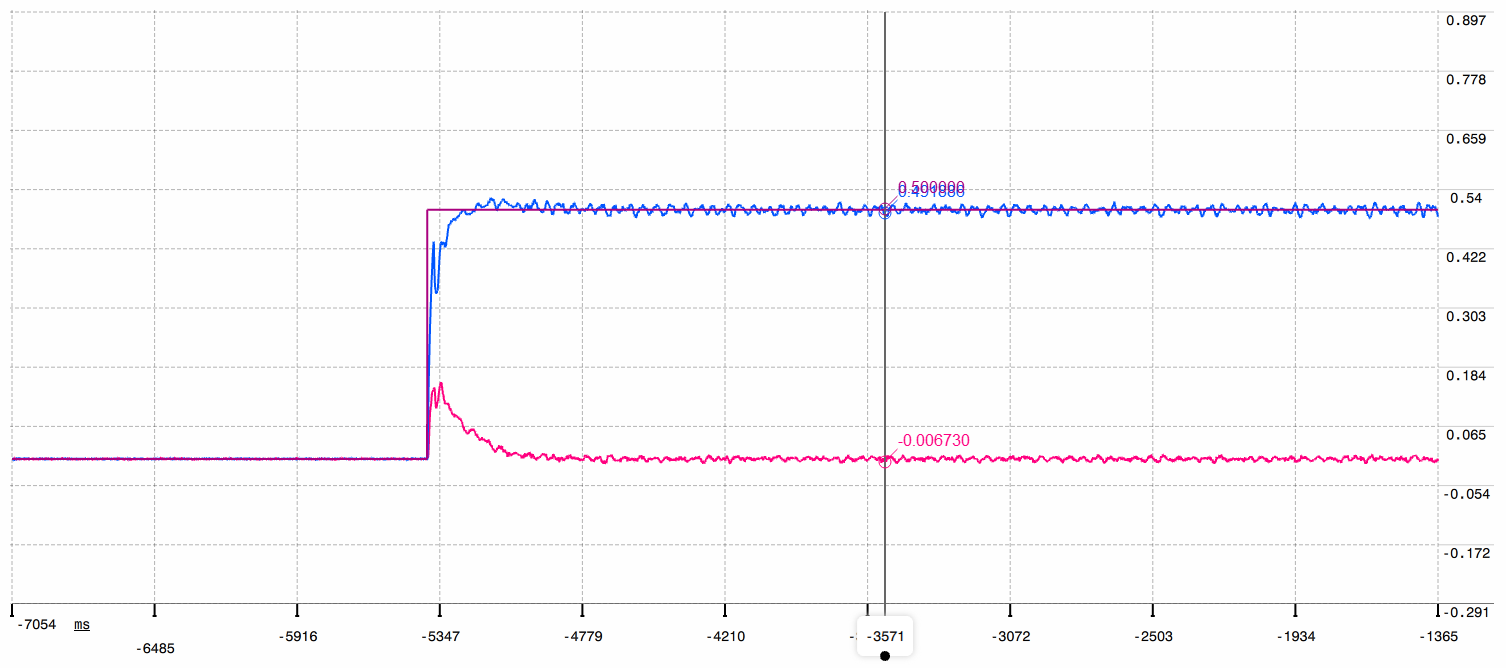
图 9 电流环阶跃响应曲线
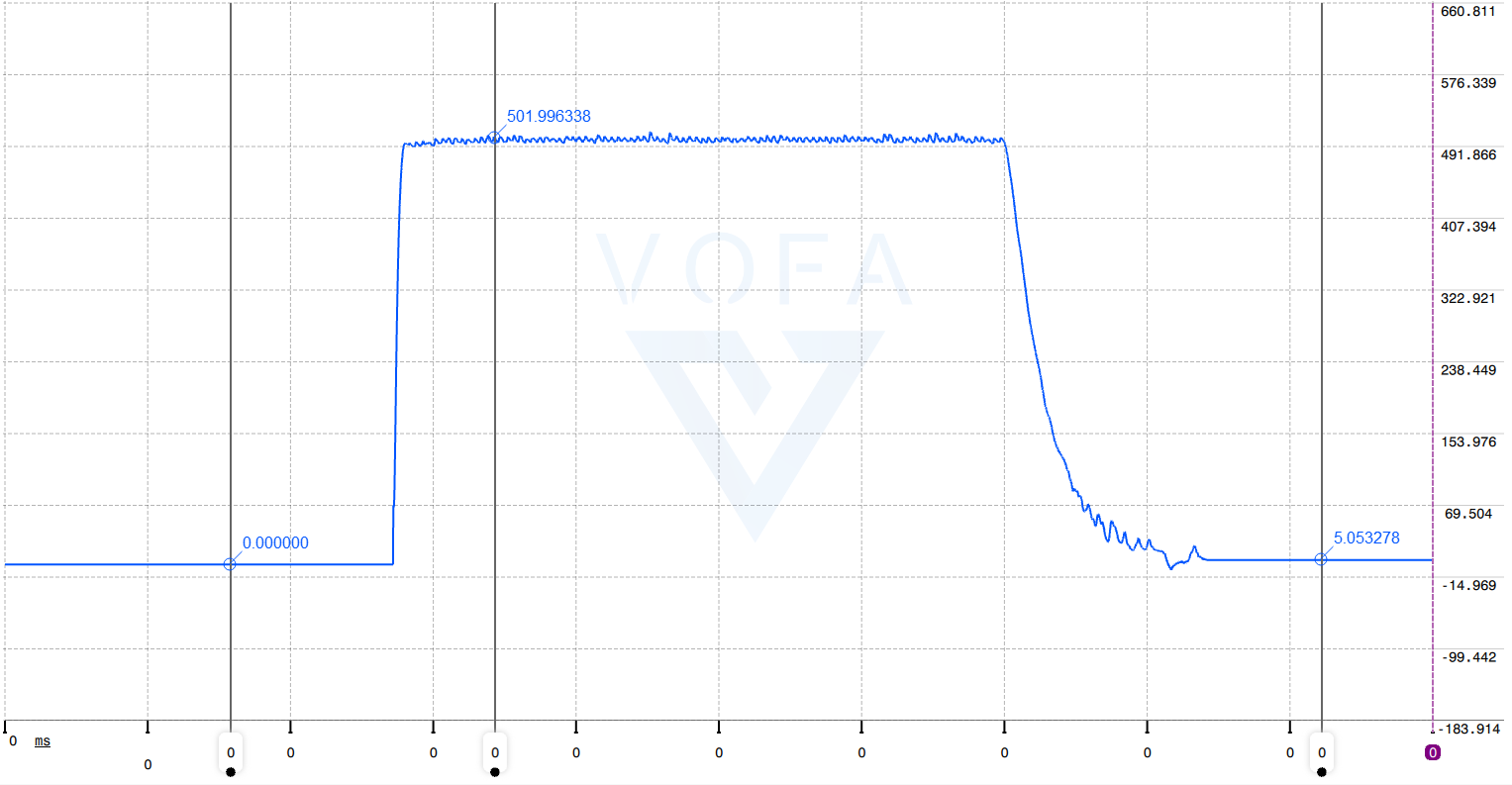
图 10 速度环阶跃响应曲线
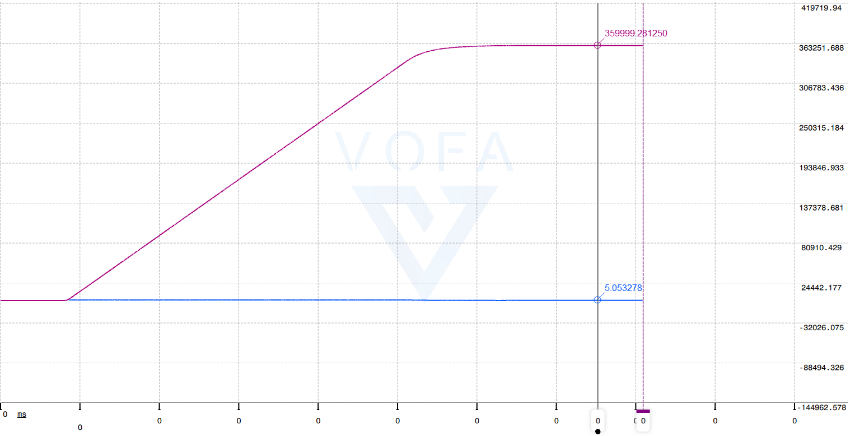
图 11 位置环静态响应曲线
d) 完成了改进版本电机绕组为三角形接法的FOC控制软件的大部分子程序的编写。其中,最大的改进是采用了低侧三电阻电流采样,该方案的好处是可以显著降低硬件成本。坏处是代码难度成倍增加,采样回的电流噪声较大,需要滤波处理。
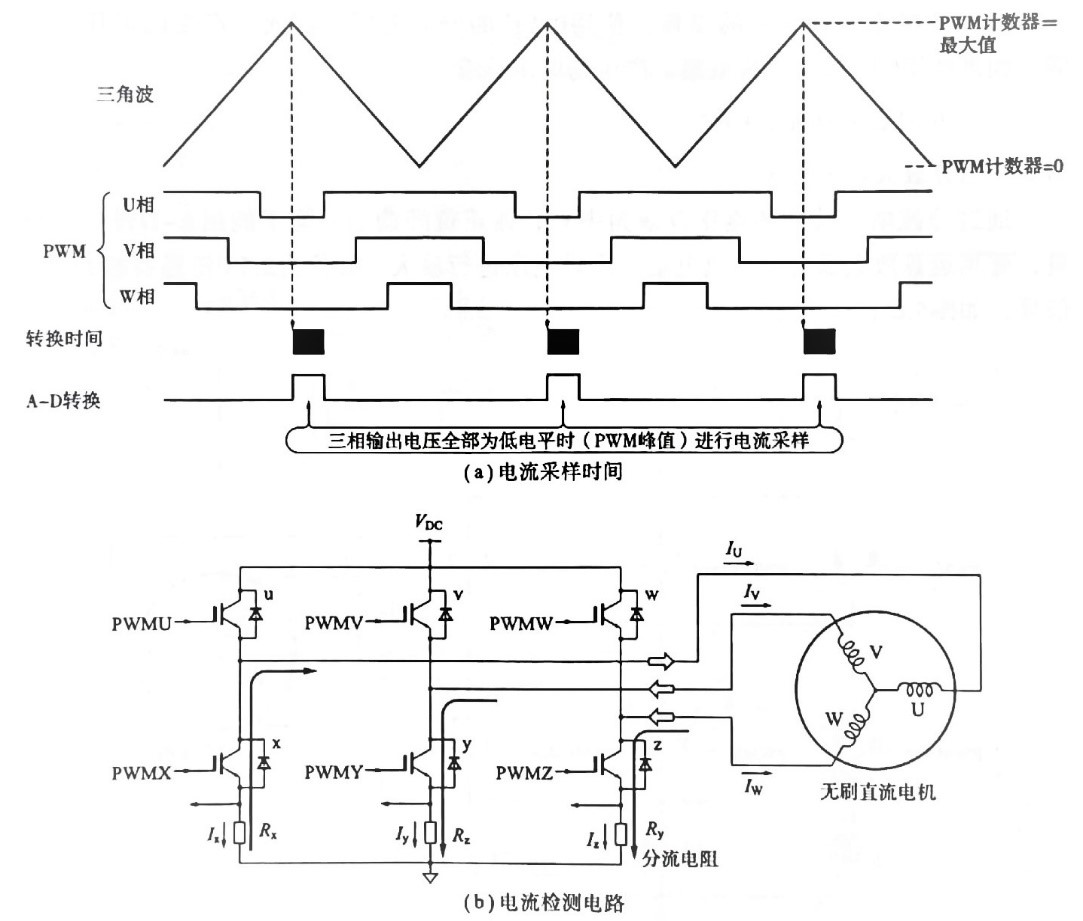
图 12 低侧三电阻采样时机和硬件示意图
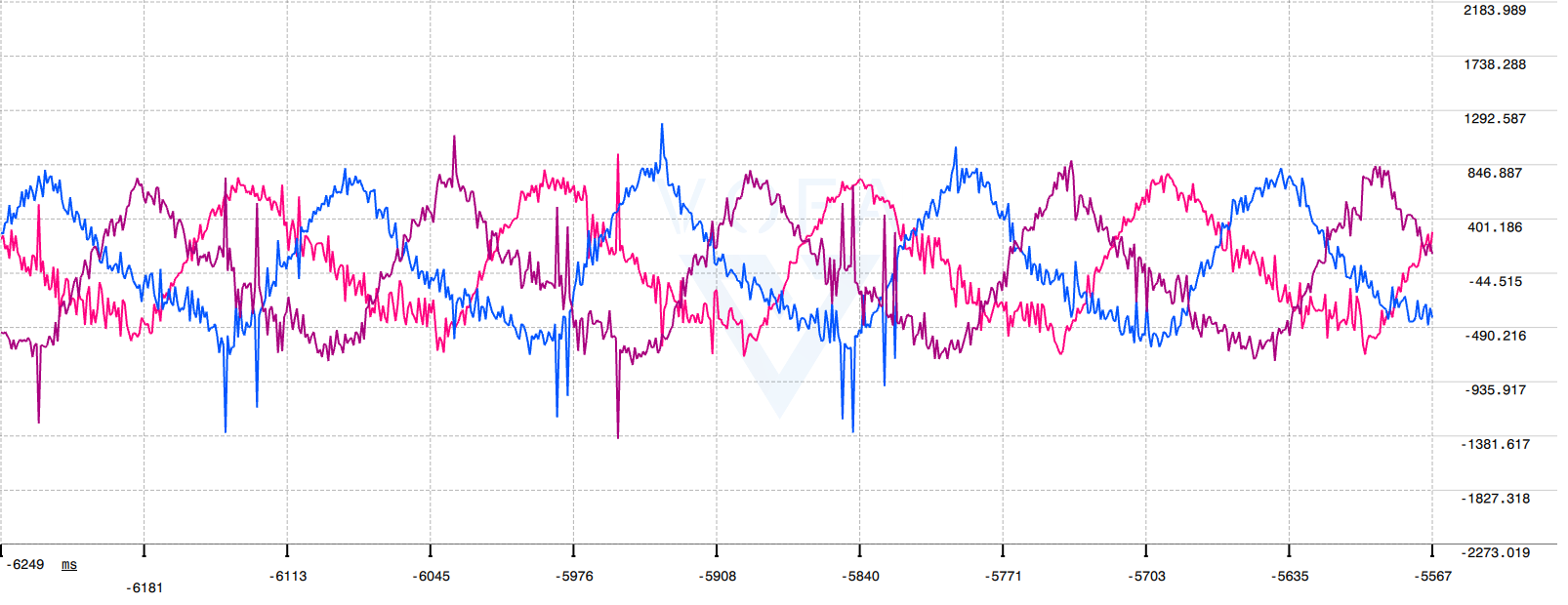
图 13 低侧电流采样原始图像
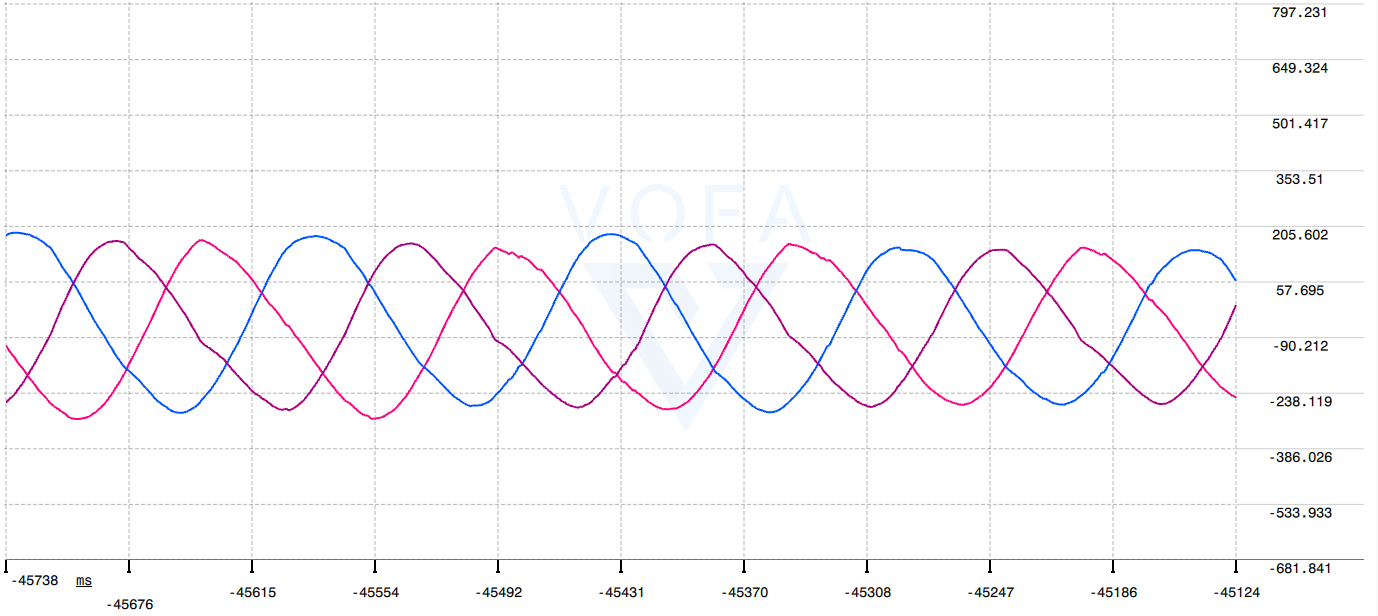
图 14低侧电流采样低通滤波后的图像
三、下一步工作计划
(1) 继续学习硬件设计,包括EDA软件的使用和线路布局等。
(2) 整合目前已经完成的代码部分,改进FOC算法,并实验测试。
(3) 对铆枪机械结构细节部分进行改进,加工所需零件并进行测试。
(4) 绘制图纸,整理材料。
(5) 撰写论文,准备答辩。

问题一:目前你电流采样所能做到的频率有多高?
回答:如果采用方案一的三电阻低侧采样,为了减少干扰,ADC的时机需要和PWM频率保持高度一致,因此,受限于PWM波的频率,所以最高只做到了25KHz。如果采用方案二的内置式电流采样,则不受PWM频率限制,使用DMA不停地搬运数据,并在需要的时候调用,所以采样频率可以做得更高。
问题二:在你的控制系统中,比如电流环部分,输入量和输出量分别是什么?
回答:电流环部分的输入,就是电流采样采回的无刷电机的三相交流电。经过Clark变换和Park变换后,获得交轴电流和直轴电流,经由PID控制器,输出交轴电压和直轴电压,再通过SVPWM算法控制电机转矩和转速。只是还可以通过电机的交轴电流计算得到电机转矩,进而得到铆接力,所以还能够认为,电流环还输出了铆枪的铆接力。

毕设开始时,我非常迷茫,如同行走于云雾缭绕的黑暗森林,找不到方向,跌跌撞撞。直到第一次组会,倪文波老师语重心长地教导我们,不要怕,毕业设计中存在全新知识是必然的,让我们多查多看,自然就会对它有所了解,进而产生自己的想法。倪文波老师还额外向我们一一介绍了应该往哪些方向查找资料,我毕设的路才逐渐明了。此外,这一路走来,倪文波老师在我毕设的各个转折点都给出了十分重要的建议,是我重要引路人。在整个毕业设计期间,我所学的知识,都不及倪文波老师传授的方法以及教育我们持有严谨的态度重要。在此,我对倪文波老师表示由衷的感谢。
同时,还要感谢我亲爱的父母、姐姐以及杨旭东学长和憨憨室友们提供的帮助,感谢你们在我焦虑无助的时候给予我鼓励,和我一起探讨解决问题的方法。最后,感谢学校图书馆相关人员提供了资料和正版软件支持。
在本次毕业设计的半个周期中,我所学之知识,所悟之方法,所获之情谊,都将成为我人生的重要组成部分,我将继续努力,希望能够顺利结题。

