学生姓名:李宁搏
班 级:测控2019-02班
指导教师:陈春俊
毕设题目:基于视觉的铝饰件质量检测系统设计


一、概况
1.选题意义
铝是地球上蕴藏量最多的金属元素,制成铝合金后具有密度小、耐腐蚀佳、热稳定性好等优点。铝合金应用于各行各业,有着举足轻重的地位,以铝代钢的趋势不断增显。与各个行业中铝的广泛应用相对应的,对铝的质量也提出了更严格的要求。
但在如今的铝饰件生产厂中,对于铝饰件的质量检测依旧较为原始。工作流程一般如下:首先将需要检测的铝件装载在推车上,而后通过人工将推车推往指定的地点。在指定的地点工人们对待检测铝件进行拆卸,并对着灯光,用肉眼一一检查,以检测铝件是否存在瑕疵。而人工检测有着许多的弊端。
基于上述对问题的陈述,本课题希望能够结合深度学习技术与现有的网络模型框架,找到适用于铝饰件表面缺陷检测的网络模型,并引入数据增广、迁移学习等技术,提高网络的性能与泛化能力,减少过拟合、梯度消失与爆炸等问题对网络性能的影响。通过阅读文献与对模型的深入学习,希望对模型进行一定的优化,并期望优化后的模型的性能表现优于现有的模型。同时进行机械方面的设计,机械和软件相结合,设计并实现一个完整的基于视觉的铝饰件表面缺陷检测系统。
2.任务分解
根据目前现有的工厂中的铝件检测流程,可将其划分为:①铝件运输过程 ②瑕疵检测过程
本课题针对上述两个过程进行优化设计,每个过程又可分为机械设计与电控设计。
(1)铝件运输过程
机械设计:首先确定了利用铝型材进行装载小车的搭建,令其运行在固定轨道上的设计思想,并在SolidWorks中进行1:1的精细建模。
因此需要:①对铝型材和轨道进行选型与尺寸的确定
②轨道之间,型材之间的固定连接
③运载小车上亚克力板与型材间的连接与尺寸的确定
④电机位置确定与连接
电控设计:确定了用电控小车装载铝件的思想
因此需要:①小车主控板的选择
②电机驱动
③小车控制代码编写
(2)瑕疵检测过程
机械设计:首先确定了利用铝型材进行龙门架的搭建,以形成检测间的设计思想,并在SolidWorks中进行1:1的精细建模。
因此需要:①对铝型材进行选型与尺寸的确定
②铝型材间的连接
③观测间上亚克力板与型材间的连接与尺寸的确定
④摄像头的选择
⑤相机云台选型
⑥光源选择
⑦实时显示屏的选择
电控设计:确定了基于视觉,利用深度学习技术,采用卷积神经网络进行瑕疵检测,并实时显示铝件缺陷信息的设计思想
因此需要:①观测间主控板的选择
②神经网络的选择
③数据集的整理
④神经网络的训练
⑤神经网络部署到边缘设备
⑥神经网络的优化(包括检测精度的提高与速度的增加)
二、已完成工作
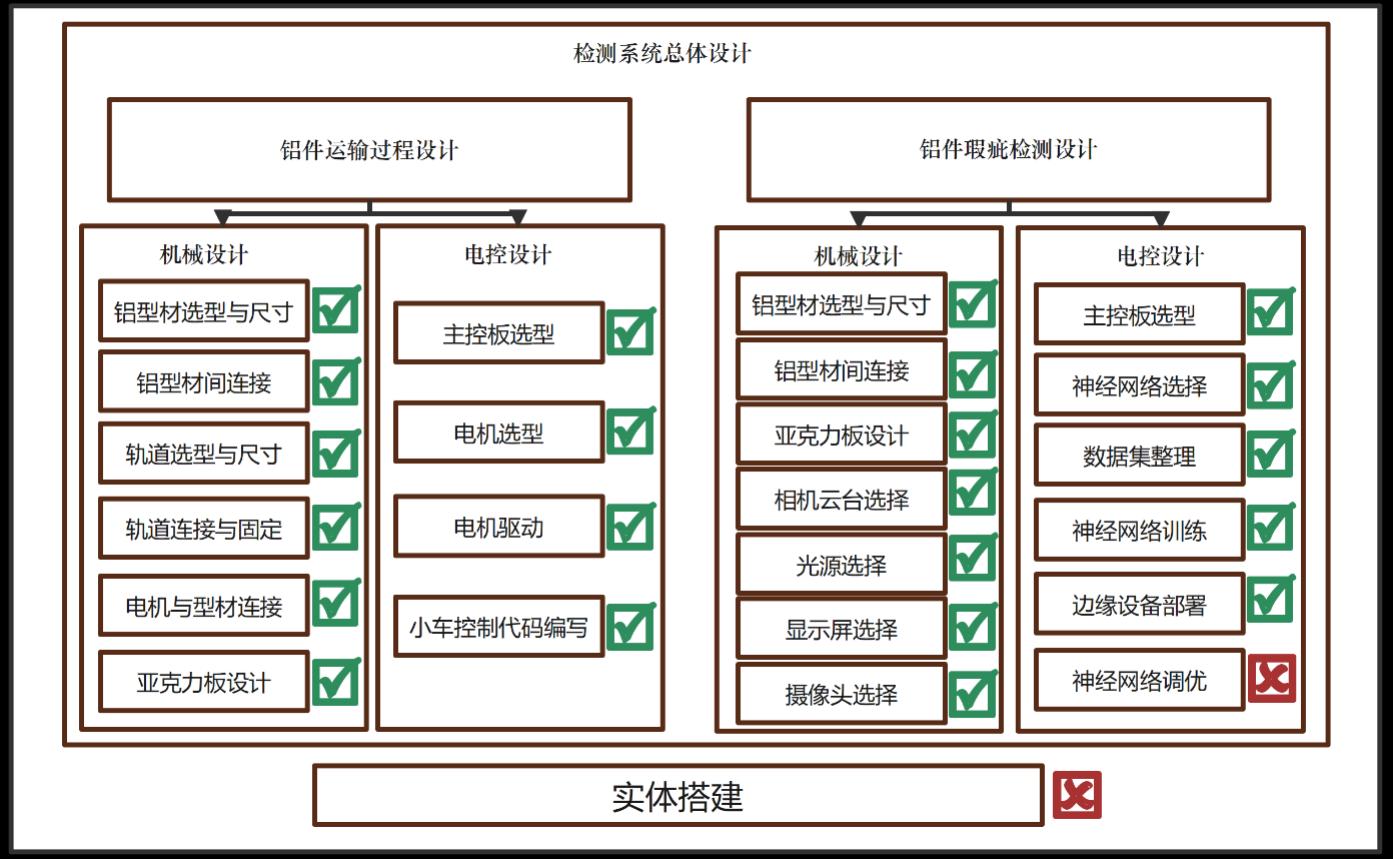
对铝件运输过程设计,机械设计与电控设计均已完成,剩余实体的搭建部分。
对铝件瑕疵检测设计,机械设计已完成,剩余实体搭建部分。电控设计除神经网络的精度调优外,均已完成。
三、下一步工作计划
(一)对铝饰件质量检测系统进行实体搭建;
(二)对瑕疵检测推理网络进行精度调优,以提高mAP值。

问题一:摄像头可覆盖范围小,如何保证铝件可以被摄像头清晰拍到?
回答:可以在电控小车上进行铝件放置区的标注,以保证铝件整体出现在摄像头的视图中。
问题二:瑕疵检测网络的速度是多少?能保证进行实时的检测吗?
回答:在利用TensorRT进行加速前,检测网络的FPS在6.5左右。加速后,检测网络的FPS在14左右,提速约115%。平时微信视频通话的FPS在15左右,所以基本可以满足实时性的要求。并且电控小车采取的是步进电机,可以进行精确的调速,以保证摄像头采集频率、网络推理速度和铝件移动速度的有机统一。

在这近4个月的毕业设计过程中,我收获颇多。首先是对深度学习技术的了解,对该技术的三类主要问题以及对应的解决问题的手段有了深刻的体会。特别是对目标检测问题有了更深刻的理解,对各种分类和目标检测网络都有了一定的了解。在毕设中利用的是YOLO网络,对该系列的网络的演进与改进也进行了学习。再是对测控系统设计的思考,明白了如何设计一个合格的测控系统,且加入机械设计后,对系统的考虑也要更加的全面,否则就会出现问题。最后,学习结合实践,使我对这些知识都有了更加全面且深刻的领悟。
感谢本次中期答辩的老师,老师们非常友善,提出的问题十分有价值,让我对存在的问题有了清晰的认知。感谢陈春俊老师耐心细致的解答,每周二的讨论会都会让我发现目前存在的问题以及得到解决问题的思路,使得我可以顺利且有效的推进毕业设计。

