
学生姓名:万承明
班 级:机械2019-08班
指导教师:王海波
毕设题目:光伏组件智能安装设备控制系统设计

一、概况
1.选题意义
光伏产业为我国重点发展产业,对光伏组件的安装方式进行改进升级是发展光伏产业迫切的需求,如果能够实现光伏组件的智能安装则可以降低工人劳动强度,降低光伏电站建设成本,而目前光伏组件的安装方式多为人工安装,安装的效率低下,且会耗费大量的时间和成本,同时长时间在露天环境下工作对工人的要求也会相应提高。
现有的人工安装方式多适用于地面,若是水上作业则难度加大,在安装过程中由于光伏面板的移动导致船体易受重力作用发生偏斜,进而威胁到安装工人的生命安全,同时对光伏组件面板安装的美观性产生一定的影响。
本毕业设计旨在设计出一种光伏组件智能安装设备控制系统,实现大跨度作业下光伏组件连续式安装,提高光伏组件安装效率和准确度。现今主要针对钢绞线收放控制系统进行设计,实现双摩擦卷筒的收放线同步以及光伏面板的安装不发生偏转。
通过本次毕业设计,学生可以掌握工程实践中的设计方法和熟悉设计过程,学会查询、收集和运用设计资料,并综合运用所学知识提高设计质量和水平。
2.任务分解
(1)查阅文献资料、阅读和理解资料,了解光伏产业和光伏安装设备现状。
(2)查阅资料了解光伏组件智能安装装置的结构,明确控制系统要求。
(3)对光伏组件智能安装设备进行控制系统设计,完成主要器件选型。
(4)完成电控柜设计建模,绘制电气原理图,编写智能控制算法。
(5)完成毕业论文、一定代码、文献翻译、毕业答辩并按规范提交相关文件。
二、已完成工作
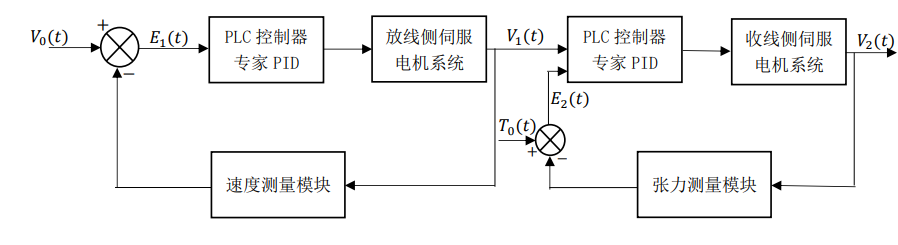
1.控制系统的总体设计
放卷端和收卷端都是独立控制的伺服电机,设定放卷为恒速度控制,收卷为恒张力控制,控制PLC输出控制量,使得放卷线速度恒定,收卷跟随放卷速度,并在此基础上根据系统当前张力状况,调节收卷线速度,使得系统维持张力恒定。
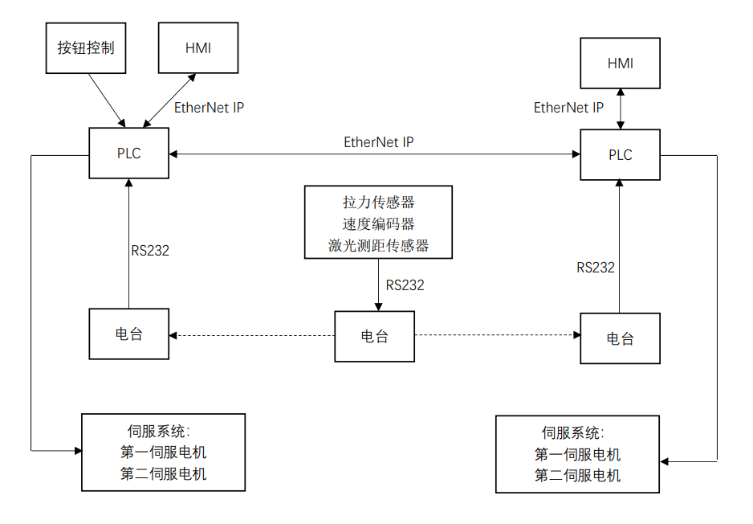
2.控制结构框图:主要硬件之间的信息通讯
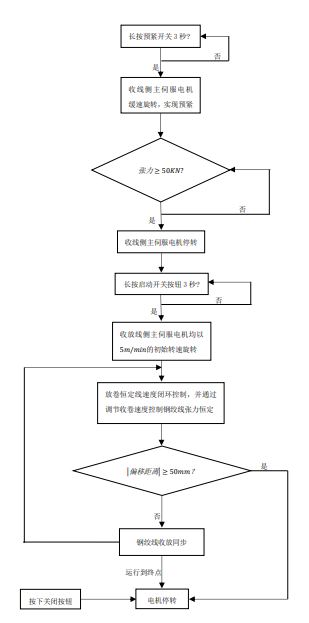
3.控制主要流程图
4.电机选型计算
主伺服电机额定功率为11KW,额定转速为1500r/mins;微调伺服电机额定功率为1.5KW,额定转速为3000r/mins;减速机传动比为50.73

5.主要器件选型
施耐德TM241CEC24R: 24点输入/输出,源型晶体管脉冲输出;TM3AM6:4路模拟量输入和2路模拟量输出,均选用电流4~20mA;编码器E6C3-CWZ3EH 2500P/R 1M:精度为2500线;AR700_6 :量程为152.4mm;HBK K‐U2B- 100K- 00A8- X- S- VA2:量程为100KN

6.电气原理图
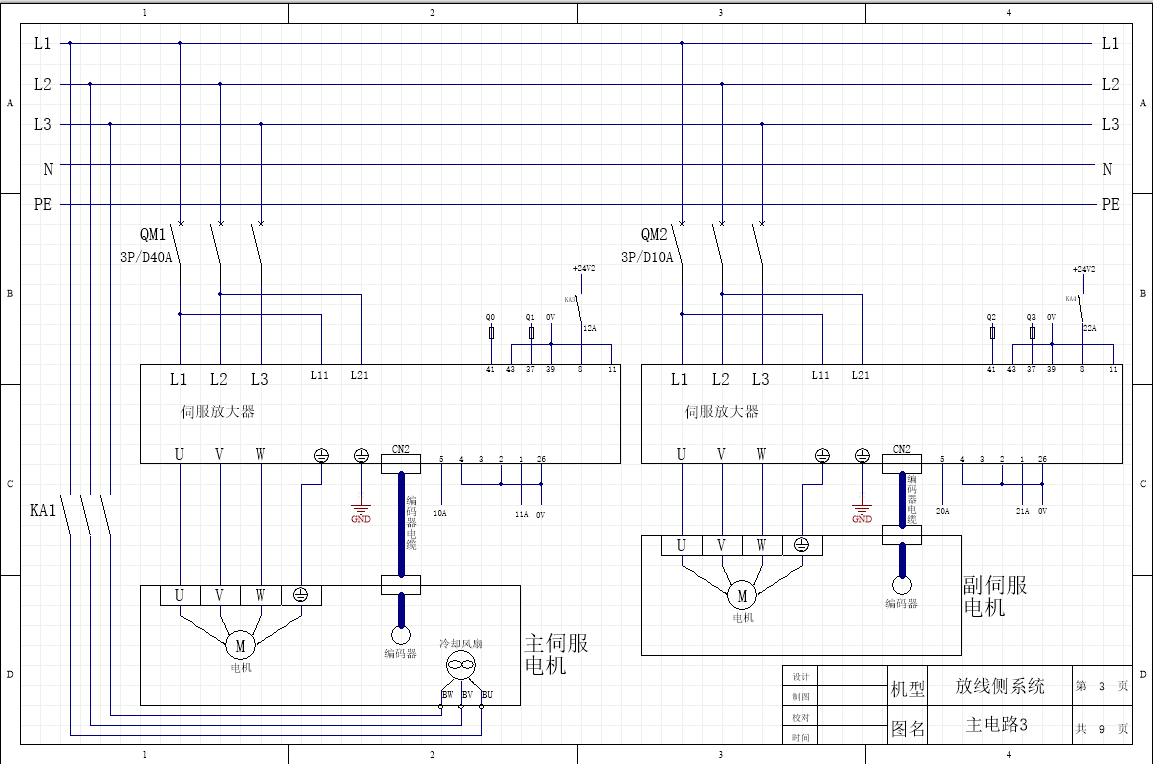
7. 电控柜3D建模
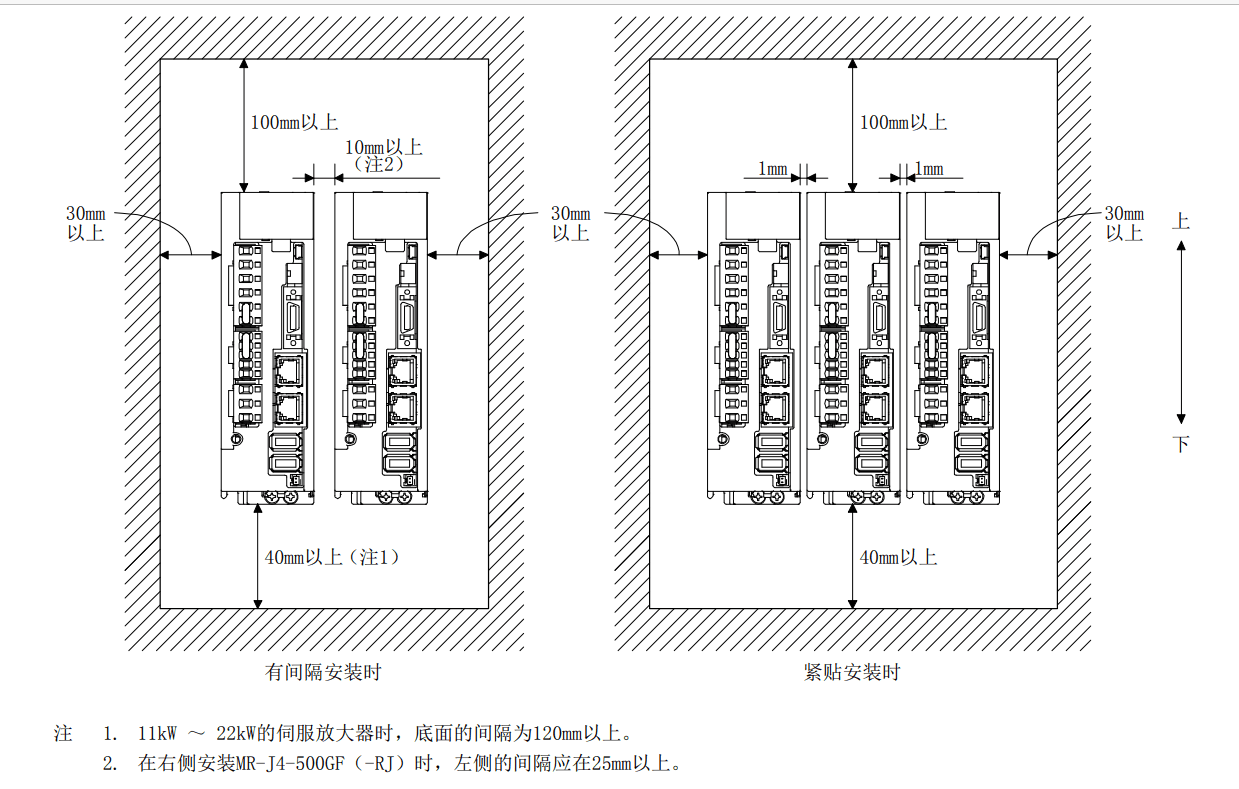
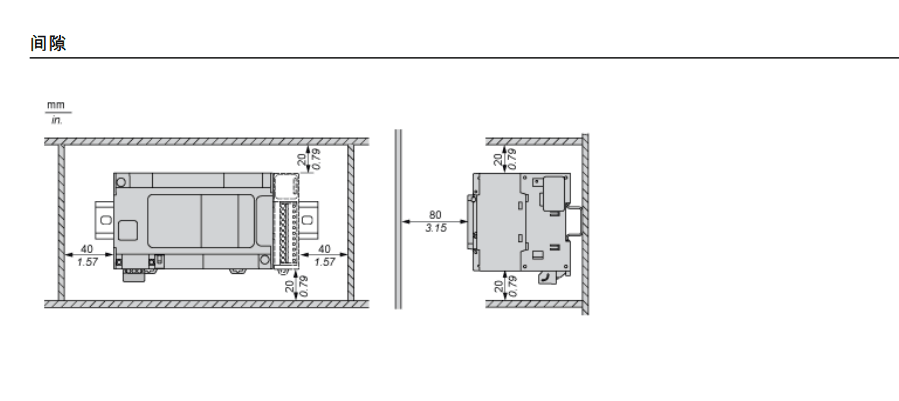
严格按照器件说明书进行器件建模,按照安装要求尺寸进行电控柜设计建模

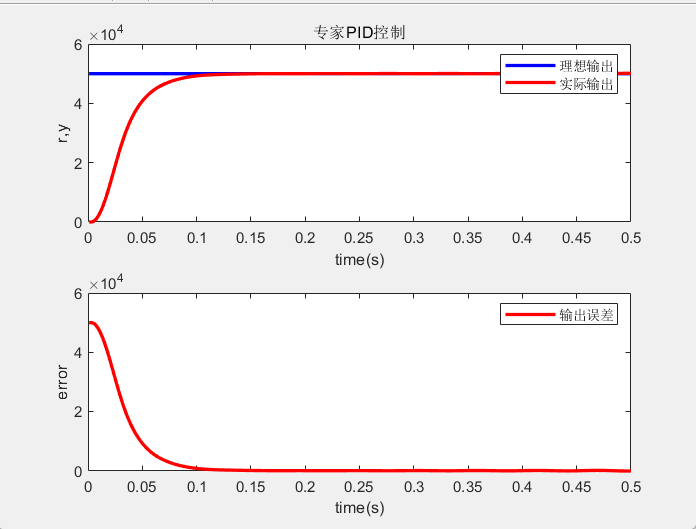
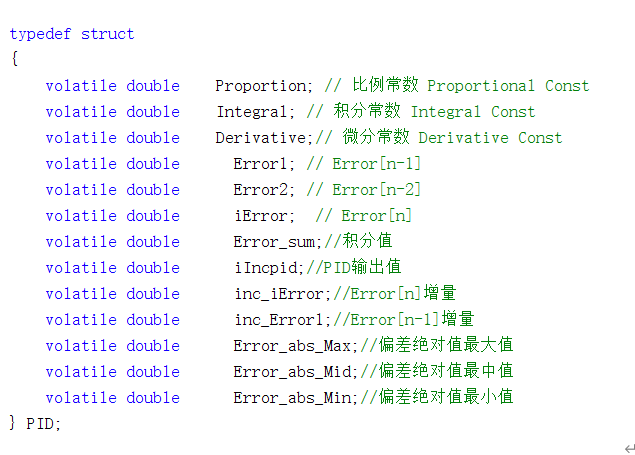
8.控制算法:专家PID
8.1用C语言编写S函数进行算法仿真模拟和参数整定
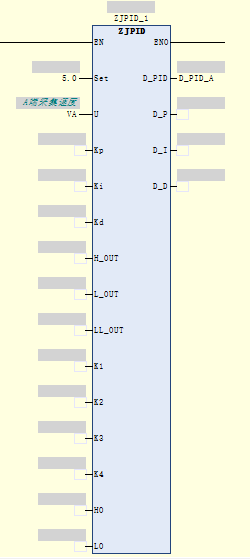
8.2 LD语言实现算法模块
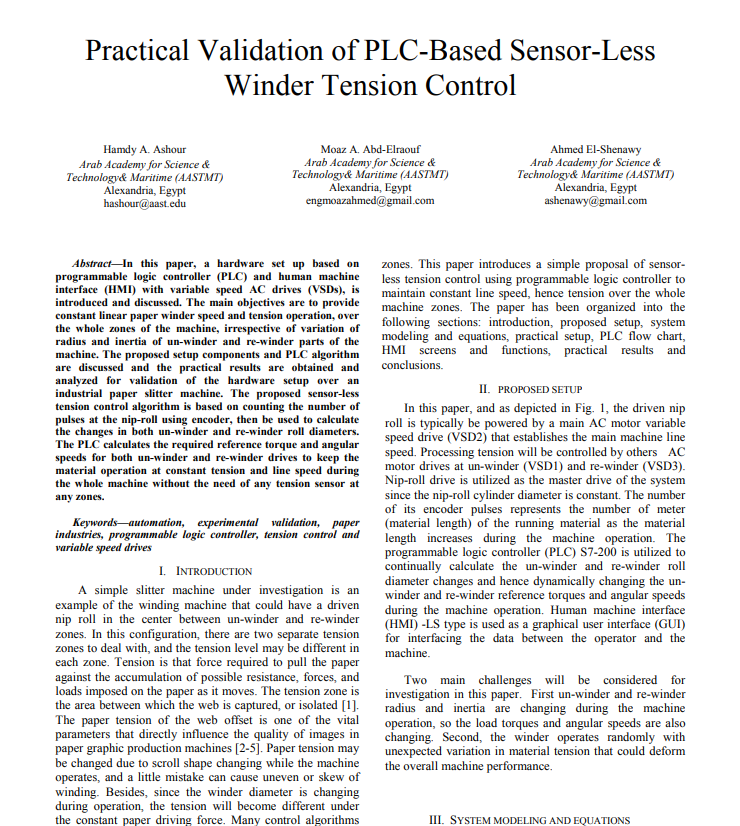
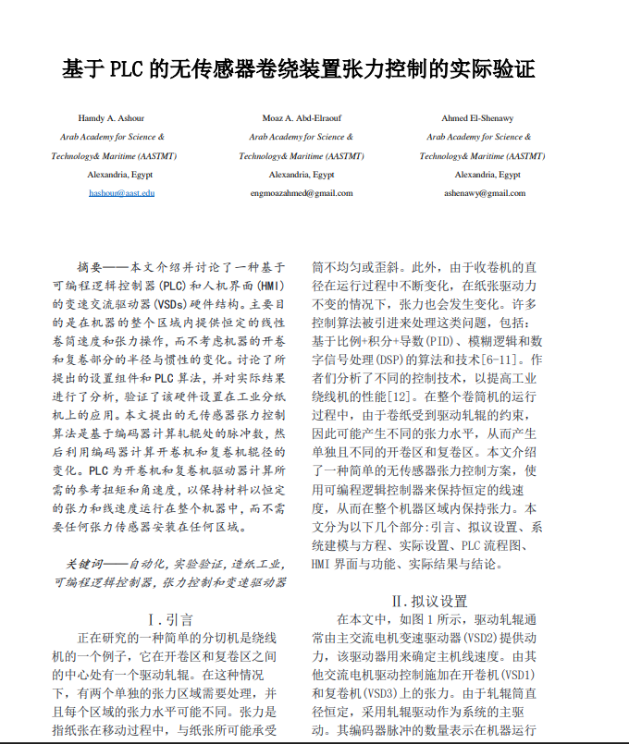
9.文献翻译
三、下一步工作计划
(1)在已完成的工作基础上用SoMachine软件进行钢绞线收放控制程序编写仿真
(2)继续利用simulink的S函数模块进行算法仿真以及参数整定。
(3)进行毕业设计论文撰写修改以及准备毕业答辩。

问题一:阐述一下方案中的电机控制?
回答:放卷端和收卷端都具有独立控制的伺服电机系统,每一端伺服电机系统包括一个主伺服电机和一个微调伺服电机。主伺服电机可以同步控制两侧双摩擦卷筒,具有整体调控作用。微调伺服电机只能调整该侧的双摩擦卷筒,在不影响另一侧的条件下使该侧达到控制要求。
问题二:评价一下现在的进度?
回答:我认为我的进度是很合理的,截至到目前为止已经完成了75%左右,能够在要求的期限内完成本次毕业设计。

在毕业设计的过程中,常常会遇到曲折和困难,但是在面临困难时往往也能找到新的转机。其实整个毕业设计工作我需要用到SoMachine、SOLIDWORKS、MATLAB/SIMULINK和AD等软件,学习和使用难度都是很大的,但我认真学习,最终能够较为熟练的掌握并利用其完成我的控制系统设计,对此我还是很开心的。
这段学习及应用之旅,我总结了几点体会(1)在学习软件使用时,要勇于尝试,不要仅停留在理论掌握上。要多编程、多尝试、多仿真运行,并且利用网上资源进行学习。(2)在做的过程中要持续思考,并注意细节。选用控制算法时一定要深思熟虑,控制精度要高并且要有较好的鲁棒性。如果出现问题,要仔细检查,学会解决问题。(3)毕业设计解决的问题相对于课堂上的解题更为综合,需要掌握多种知识。在做的过程中需要实时复习学过的知识,避免含混不清。
最后,我特别感谢我的指导老师王海波老师和李战斌学长。王老师在思路的大方向对我进行指点,李战斌学长在实现思路的具体细节方面给我提供帮助,如此我才能顺利的完成以上工作任务。

