学生姓名:张文
班 级:交控2019-06班
指导教师:曾祥光
毕设题目:微型共轴双旋翼飞行器设计


一、概况
1.选题意义
近几年来,微型旋翼飞行器以其优越的悬停、转弯和能够向各方向移动的灵活性、结构简单、尺寸紧凑的特点以及续航性能,使其非常适合动态环境下的操作。与固定翼飞机相比,微型旋翼无人机具有显著优势,特别是在需要保留飞机静止(悬停)时或在严格受限的环境中操纵的能力。目前已经广泛应用于无人侦察、现代救援、玩具等领域。例如在救援任务中,微型旋翼无人机可以执行例如人员搜救、通讯中继、路况探索、甚至直接携带救援物资等。

图1 微型旋翼无人机可应用领域
共轴双旋翼飞行器是一种依靠平衡上下旋翼反向旋转产生的扭矩差实现偏航控制的飞行器,其主要原理为上下两旋翼向相反方向旋转,在提供了飞行器悬浮升力的同时,使其在飞行过程中产生的扭矩可以相互抵消,来保持机体的稳定性,从而大大提高了其悬停能力和悬停效率。
相比于四旋翼无人机,共轴双旋翼飞行器节省了旋翼材料和另外的电机和舵机成本,且由于没有尾桨,消除了尾桨故障的隐患,具有较高的安全性;与传统的单旋翼带尾桨直升机相比,共轴双旋翼直升机由于没有尾桨的功率损耗,因此具有更高的悬停效率;由于其操控性强、灵活性高的特点,可在狭窄的空间进行垂直起降,定点悬停和低速飞行的特性使其在执行高精度查询任务时更具有优势。

图2 共轴双旋翼无人机
本次毕业设计旨在设计并制作一款新型的微型共轴双旋翼飞行器,该飞行器要求具有结构简单、容易制造、体积小、携带方便等优点。主要内容将包括飞行器的机械结构设计、机械结构三维建模、对飞行器进行仿真分析、飞行器的控制程序设计、实物制作与测试等几大部分。课题将充分结合机械原理、机械设计、三维制图、单片机原理及其应用、自动控制原理等专业课程知识,科学合理地进行飞行器的设计和制作工作。
2.任务分解
本次毕业设计主体任务如下:
1、设计飞行器的主体机械结构,包括飞行器任务载荷、电池仓、机身、下桨盘及其运动机构、上桨盘及其运动机构等5大部分,并通过理论计算,建立起飞行器飞行的动力学模型。
2、在Solidworks建模软件上对飞行器机械机构进行建模、装配,同时对三维模型进行运动仿真、模型运动干涉检查。
3、飞行器的运动控制系统设计,包括旋翼的电机控制、舵机电路控制、飞行器姿态控制等。
4、完成实物制作及调试。飞行器零部件设计及加工、控制系统软硬件设计、购买相应材料和模组,烧入程序,飞行器功能调试,实现系统设计功能。
5、撰写论文,参加毕业答辩。
二、已完成工作
截至目前,本次毕业设计已完成的工作有:
1、已完成共轴双旋翼飞行器的文献资料的初步查找和阅读工作:
(1)已通过学校图书馆官网登录查阅知网等方式,完成共轴双旋翼飞行器整机原理、运动模型、飞行姿态控制、程序设计等有关方面30多篇期刊和学术论文等资料的阅读工作,其中国外相关研究期刊和论文的阅读量已达到10篇以上。
图3 已完成阅读的文献资料
(2)已完成外语文献的翻译工作:
图4 已完成的外文期刊翻译
2、已完成飞行器的主体机械结构设计工作:
主要包括其上下旋翼转盘结构设计以及飞行器运动结构设计及下部搭载荷载部分的结构设计,以确保其能以合理的运动方式和足够的强度,达到预期的飞行条件和飞行效果。
3、完成飞行器飞行的质心运动学和动力学分析,为后续程序控制系统设计奠定了理论依据。
4、已完成飞行器运动部分各零件的SolidWorks三维模型的搭建工作,且在SolidWorks中将其进行了初步装配和干涉检查,通过3D打印或购买零配件,进行了飞行器动力学模型的组装和调试工作。
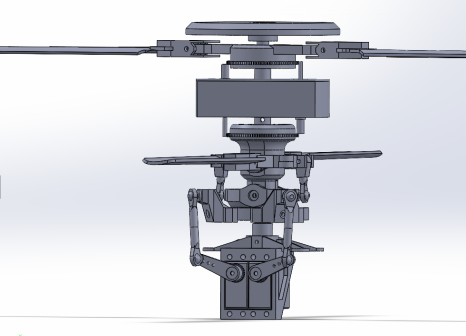
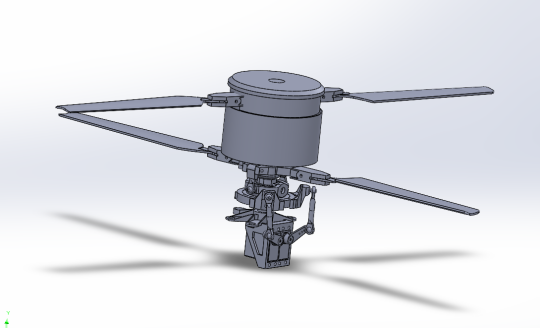
图5 所建立的飞行器运动部分Solid Works三维模型
5、已完成的部分控制程序代码编写和调试工作:
(1)已完成Pixhawk2.4.8飞控固件和Mission Planner地面站连接工作,地面站可以正常读取飞控固件陀螺仪、气流计、航向角等数据,后续在连接上无线信号收发装置后,还可通过此地面站实时回传其姿态数据。
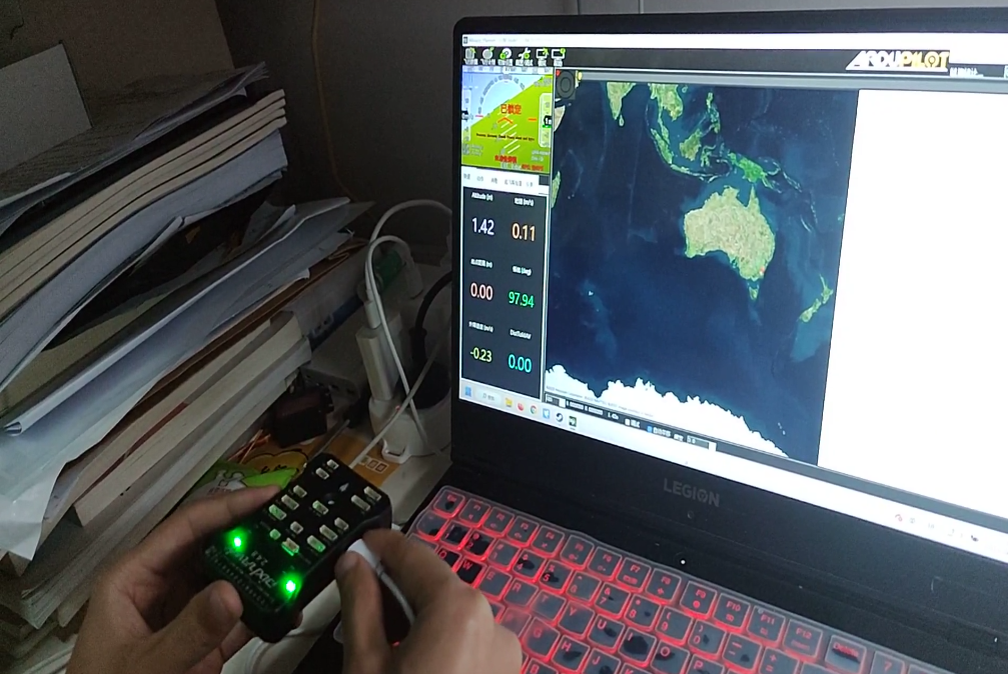
图6 飞控固件和地面站连接后进行陀螺仪调试
(2)已在Mission Planner地面站进行飞行器飞行模拟测试学习,得到了模拟测试的飞行日志以分析姿态变换、电机控制等方面的数据,后续将继续添加飞行器的实际控制程序,并在此地面站进行参数调整方面的工作。
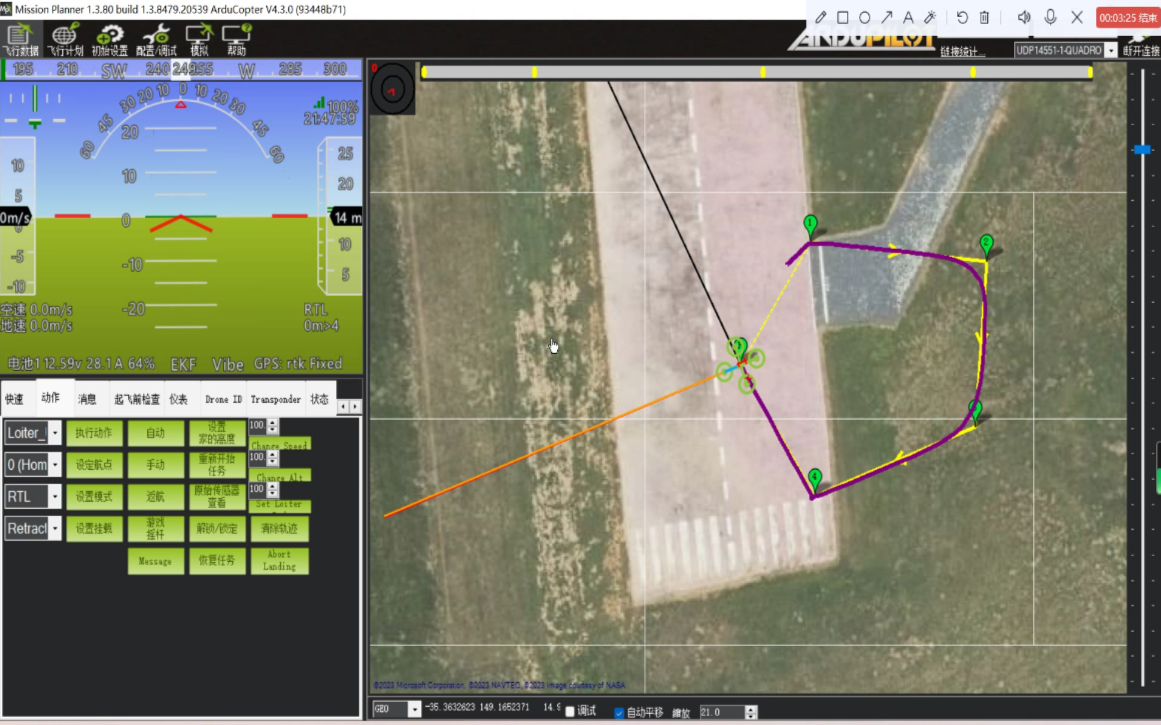
图7 在地面站程序进行飞行器飞行仿真

图8 飞行仿真得到的飞行器电机控制数据
三、下一步工作计划
1、完成飞行器控制程序的编写工作,同时应将已完成的模型进行3D打印,以用于加快后续程序修改工作,提升整体进度。(约2周)
2、进一步完善三维模型,完成飞行器整机的三维模型设计及装配,并在此基础上进行飞行器仿真模拟工作。(约1周)
3、完善飞控程序及飞行器组装,进行飞行器实物制作和测试工作。(约2周)
4、认真完成毕业论文的编写,准备好毕业答辩的工作。(约2周)

问题一:毕业设计工作量大,整体飞行器设计的工作内容包括飞行器动力学方程的建立、飞行器整体机械结构的设计、飞行器三维模型的建立、控制程序编写和最后的实物制作调试等部分,每一步工作量都挺大且都比较有难度,对设计任务是如何规划和安排的?
回答:本题目若是只进行飞行器机械结构的设计或是只进行飞行器飞行控制程序的编写工作,都无法很好地对所涉设计的飞行器的最终运动效果进行比较合理地评判,使得飞行器的参数设置或是姿态调整等均难以进行有效地确定,故因此我决定进行整个飞行器的设计。
问题二:毕业论文整体架构中,飞行器机械模型部分并未在架构中得到体现,它包含在你的毕业论文的哪一个章节里呢?如果原论文架构中里没有的话,希望能加入这一章节。
回答:谢谢各位老师的指点,这一部分的内容我本来预设是在无人机的工作原理中进行此次无人机机械模型的整体架构和其飞行原理部分的阐述工作,仔细想来将此部分另外写成一部分独立章节确实更好,我将调整本次毕业论文的写作架构,在无人机飞行数学模型和所设计飞行器控制程序间加入此飞行器的模型建立章节,以体现设计过程中飞行器模型的建立过程和最终模型展示。

光影似箭,岁月如梭,不知不觉间四年的大学生涯即将结束,眼下我们正在紧张地进行着毕业设计这项工作量大、极具挑战性的任务。在我看来,毕业设计的工作不仅仅是对我们整个大学四年专业知识的检验,更多代表的是对我们发现问题、解决问题能力的提高,成功的毕业设计既离不开丰富的理论基础,更离不开丰富的实践经验和动手能力。
我的毕业设计题目旨在设计并制作一款新型的微型共轴双旋翼飞行器,其将具有操纵性能好、飞行安全可靠性高、可进行悬停飞行并且飞行效率高、机动性能优越、有效载荷能力强等特点。目前,我的毕业设计项目还在紧锣密鼓地进行中,虽然到目前已经取得了一些阶段性成果,比如已完成飞行器的机械结构设计、进行飞行动力学方程建模、飞行器机械结构三维建模等工作,但是距离项目完全完成还需一定的工作量,还得继续努力,迎难而上。
回望到此之前做毕业设计的过程,可以说苦乐并存,我的整个毕业设计的工作量很大,整个设计过种中可谓困难重重,各种专业知识综合归纳需要不断翻书实在耗费精力,在每个设计过程中不断冒出的新问题也在时时刻刻令人头疼,但每次在认真思考、动手处理、最后解决问题的那刻还是会由衷地发出事在人为的感慨,在这个过程中,不仅仅是我们的耐心、专业知识掌握情况、发现问题和解决问题的能力、动手实践能力得到了提升,我们的自信心和成就感也得到了很大的满足,一步一个脚印地慢慢前进,才能换来一点一滴的自我进步。
当然,此次毕业设计能有目前的进度和成果,离不开指导老师的悉心教导以及同组各位同学们的经验交流,从他们身上我学到了很多东西,也很感激他们的分析和鼓励,帮助我解决了很多在设计过程中遇到的棘手的问题。
总之,通过这次的毕业设计工作,我对自身所学的专业知识有了一些新的体悟,“纸上得来终觉浅,绝知此事要躬行”,只有实践中进行运用才能切身地体验到知识的脉动。同时,学习是一个长期积累的过程,“书到用时方恨少”,我们都应该努力提高自身的自学能力,在工作、生活中都应不断的学习,努力提高自己知识和综合素质。
我的毕业设计工作还未全部完成,虽然截至现在已经得到了一些成果,但我并不想为这些已有的东西而骄傲自满,相反,我需要将更多的学习、更多的精力投入到接下来的工作以及以后的生活中,或许还会遇到更多更难的问题,但我相信,只要冷静分析、沉着应对,再高的台阶也能最终跨越过去迎接扑面的花香。

